Home | Featured Articles
The articles selected below have been identified by our Editors as being highly valuable to the engineering community. You can access the full article for free on IEEE Xplore. Follow the link provided.
Game Theoretic Mixed Experts for Combinational Adversarial Machine Learning
Read on IEEE Xplore
Extremely Low-Profile Four-Antenna Module Covering U6 GHz Band and Its Extreme Receive Antennas-Aided MIMO Application for 6G Mobile Devices
Toward Varying Bipedal Walking Gaits Using Rolling Ball-Tray Dynamics at the Walker’s Core
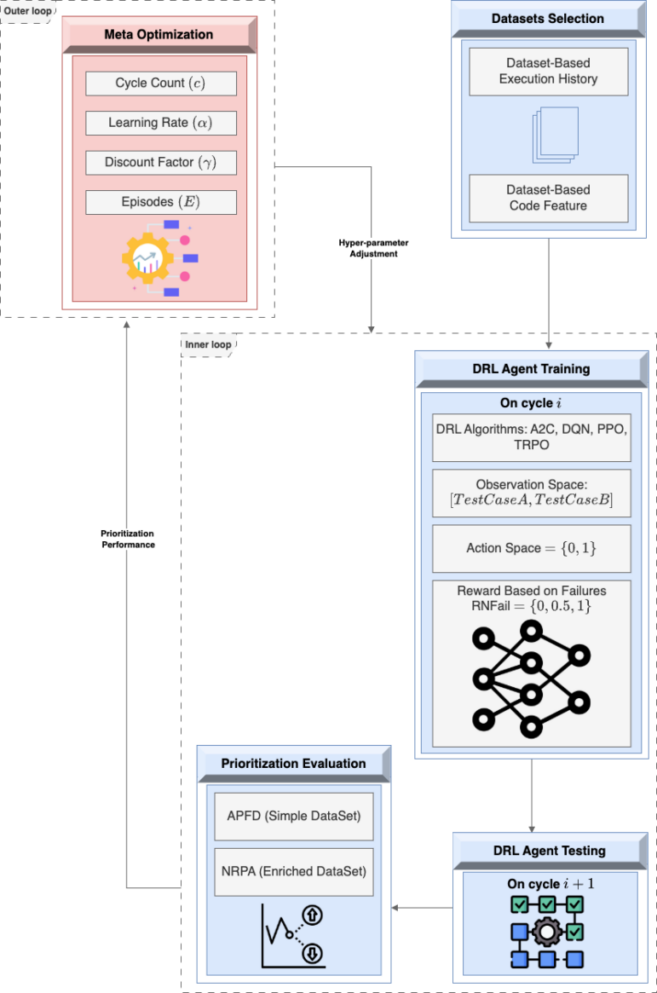
Optimizing Test Case Prioritization With Meta Deep Reinforcement Learning in Continuous Integration
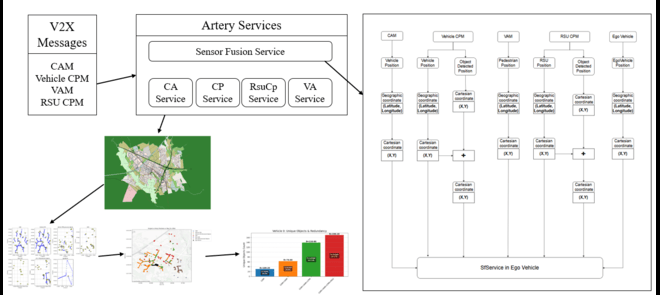
Extending Artery/OMNeT++ for Evaluating V2X Sensor Fusion Algorithms With Infrastructure Support in Cooperative Advanced Driver Assistance Systems
Performance Analysis of FGO Windowing Strategies for PDR+GNSS Fusion Architecture
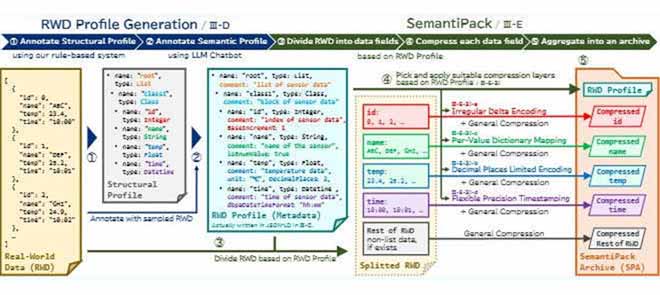
SemantiPack: An Efficient Real-World Data Compressor Using Structural and Semantic Metadata
A Wideband Dual-Polarized Reconfigurable Reflectarray Using Polarization Rotation Technique
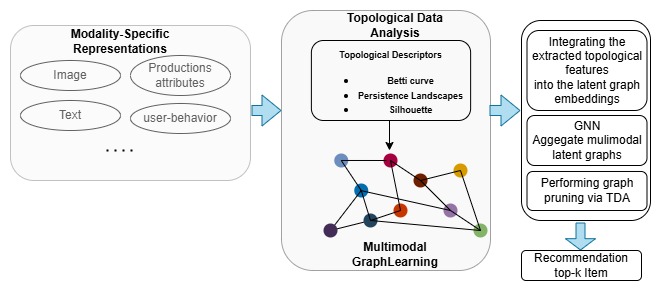
Topological Data Analysis and Graph-Based Learning for Multimodal Recommendation
Dual-Mode 2T1C DRAM Process-In-Memory Architecture for Boolean and MAC Operations